
Expert - Firmware - Driver
Neste laboratório de especialização de firmware vocês vão aprender como criar drivers para periféricos a fim de tornar o código mais portátil, eficiente e com menos falhas.
Lab
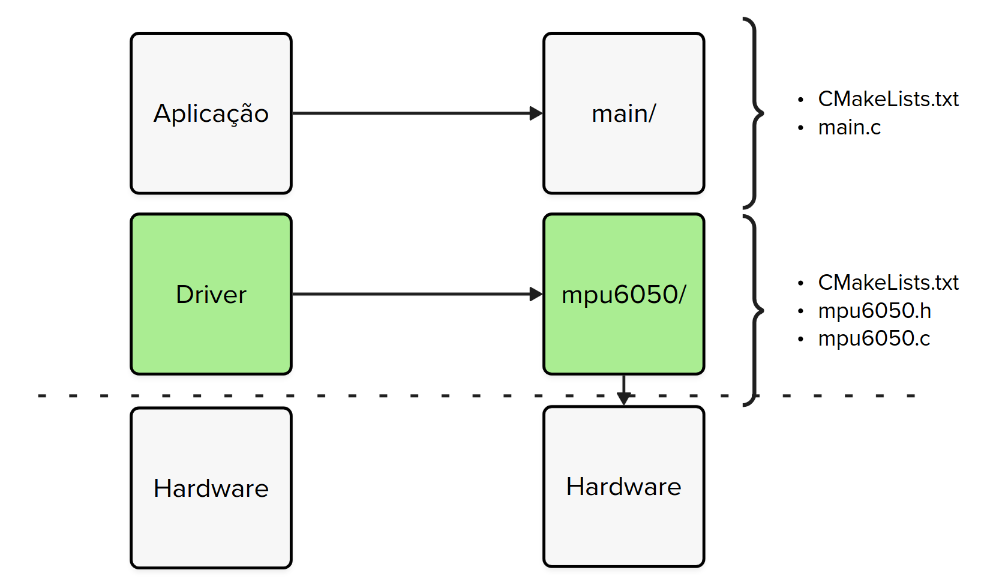
Drivers podem ser entendidos como uma camada de software que desacopla o acesso de uma aplicação a um recurso ou hardware específico.
O termo driver pode aparecer com diferentes nomes: library, api, framework, mas quando o foco é sistemas embarcados e a abstração se refere a um componente de hardware as opções mais apropriadas são: hardware abstraction layer (HAL) ou driver.
Os drivers podem ser disponibilizados de diversas maneiras diferentes, mas no final, será composto por uma série de arquivos .h e .c que vão possibilitar a interface entre a aplicação e o hardware em questão.
CMake
O universo de desenvolvimento da Raspberry Pi Pico é baseado em CMake, uma ferramenta cross plataforma para automação do processo de build para programas em C e C++. Leia esse material para entender como podemos criar uma lib em C no sistema de CMake da Pico:
- Lib em
Cna Pico viaCMake: Link
Drivers
Drivers são camadas de software que desacoplam o baixo nível da aplicação possibilitando o reaproveitamento de código entre projetos.
MPU6050
A MPU6050 possui muitos recursos que não foram explorados no laboratório, iremos nessa entrega expandir as opções que podemos usar com esse módulo, por exemplo, o MPU6050 pode detectar queda ou identificar quando alguém dá um tap no sensor. Além disso, podemos configurar a resolução que o acelerômetro vai trabalhar: ±2G, ±4G (depende da aplicação, 2G pode saturar o sinal).
Lembrem de consultarem os manuais da MPU6050 para mais informações:
Poupando energia
A MPU6050 pode gerar uma interrupção quando um movimento determinado for detectado, isso é muito útil para permitir que o sistema embarcado entre em modo sleep enquanto aguarda um movimento, e aí ele é acordado com essa interrupção processando os dados, e poupando energia quando não precisa processar (imagine um controle bluetooth que liga quando é pegado da mesa, ou um smartwatch que liga a tela quando o braço é mexido).
Para podermos usar isso, teremos que fornecer uma camada de software que permite a aplicação ativar esse recurso na MPU.
Entrega
Nessa entrega vocês devem criar um driver chamado MPU6050, para isso é necessário criar uma nova pasta com os seguintes arquivos:
CMakeLists.txt: Gerenciamento de Dependências (Inclusão de Diretórios / Adição de Executáveis e Bibliotecas / Gerenciamento de Dependências / ...):mpu6050.h: Configurações e protótiposmpu6050.c: Implementação das funções
Esses arquivos devem ser uma lib do projeto do CMake, os passos estão no material para criação da Lib em C na Pico via CMake
WARNING
O MPU6050 tem como dependência a utilização da lib hardware_i2c e ela tem como dependência a lib pico_stdlib, ou seja, você precisará inclui-las na sua lib:
CMakeLists.txt
+ target_link_libraries(nome_da_LIB hardware_i2c pico_stdlib)mpu6050.h
+ #include "hardware/i2c.h"
+ #include "pico/stdlib.h"O driver deve suportar o que já possuímos hoje, mas não foi estruturado em forma de driver:
- Ter um "objeto" de configuração;
- Permitir configurar pinos e I2C a ser utilizado;
- Funções que permitam manipular e ler a IMU;
- Funções para configurar o motion detection.
Para realizar a entrega, você deverá ler:
Geral
Você deve criar as seguintes funções e demonstrar o seu uso em um projeto, notem que as funções retornam um int, esse valor deve ser 1 para quando a execução da funções for bem sucedida ou 0 para quando falhar (timeout por exemplo).
Para deixarmos o driver mais genérico possível, vamos definir uma struct que possui as configurações necessárias para a IMU.
// no arquivo .h
typedef struct imu6050 {
// configuração do I2C
i2c_inst_t *i2c;
int pin_sda;
int pin_scl;
// configuração do range do acelerômetro
int acc_scale;
} imu_c;Função que configura o struct de configuração do componente.
void mpu6050_set_config(imu_c *config, i2c_inst_t *i2c, int pin_sda, int pin_scl, int acc_scale) { ... }Configura pinos e periférico I2C:
int mpu6050_init(imu_c config) { ... }Reinicia o dispositivo para o estado original:
int mpu6050_reset(imu_c config) { .. }Faz a leitura do acelerômetro:
int mpu6050_read_acc(imu_c config, int16_t accel[3]) { .. }Faz a leitura do giroscópio:
int mpu6050_read_gyro(imu_c config, int16_t gyro[3]) { .. }Faz a leitura da temperatura:
int mpu6050_read_temp(imu_c config, int16_t *temp) { .. }Exemplo de uso
Exemplo de uso para o driver criado:
#include "mpu6050.h"
// ...
volatile int f_irq_mpu = 0;
void gpio_callback(uint gpio, uint32_t events) {
f_irq_mpu = 1;
}
void main() {
// ...
// Configura pino para funcionar com callback
// gpio_callback
// MPU
imu_c imu_config;
// geral
mpu6050_set_config(&imu_config, 12, 13, 2);
mpu6050_reset(imu_config);
// configurando detecao de movimento
// opcional
mpu_set_motion_detection_threshold(imu_config, 1);
mpu_set_motion_detection_duration(imu_config, 20);
mpu_set_motion_detection(imu_config, 1);
while(1) {
int accel[3]; int gyro[3]; int tmp;
if (f_irq_mpu){
mpu6050_read_acc(config, accel) { .. }
mpu6050_read_gyro(config, gyro) { .. }
mpu6050_read_temp(config, &temp) { .. }
// print
}
}
}