
Expert - PPM - IHM
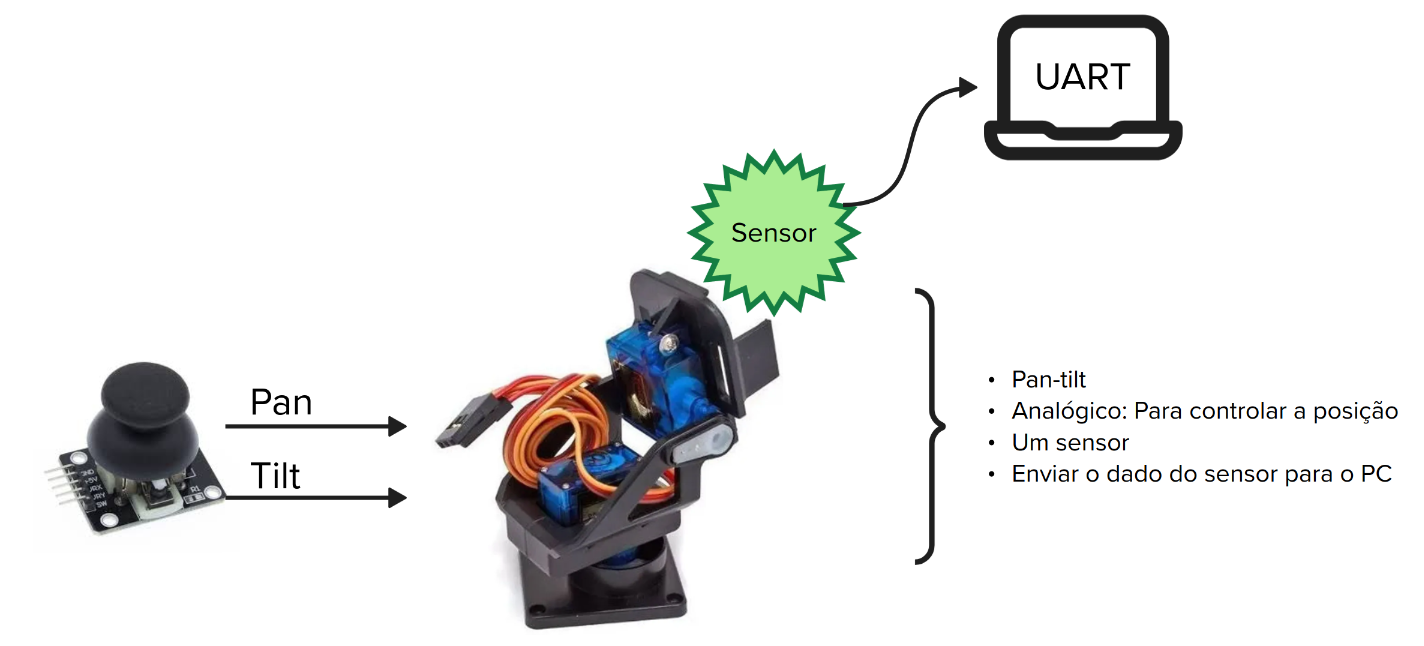
Neste laboratório, iremos criar um sistema embarcado capaz de ajustar a posição de um conjunto pan-tilt (dois servomotores) através de uma interface gráfica no PC, além de exibir em tempo real o gráfico da leitura de um sensor analógico.
Lab
Sistemas embarcados têm a função de perceber e interagir com o mundo físico, lendo sensores e controlando atuadores.
Esse processo, embora essencial, é frequentemente desafiador — envolve lidar com dispositivos externos de diferentes tipos, cada um com interfaces elétricas, protocolos e comportamentos próprios.
Exploraremos esse universo de forma prática, desenvolvendo soluções que integram aferição, controle e comunicação. Você deverá criar um sistema embarcado completo, que une:
- Controle de posição utilizando servomotores (mecanismo Pan-Tilt);
- Monitoramento de sensores analógicos para capturar grandezas físicas;
- e uma interface homem-máquina (IHM) no PC, que permite visualizar e comandar o sistema em tempo real.
O objetivo é proporcionar uma visão integrada do ciclo completo de um sistema embarcado — da leitura do sensor até o controle preciso do atuador, com feedback visual e interação pelo usuário.
Servomotor
Um servomotor é um atuador de posição com malha fechada interna, que se move automaticamente até o ângulo solicitado. É amplamente utilizado em aplicações como:
- Controle de direção de carrinhos e robôs
- Posicionamento de câmeras
- Fechaduras e mecanismos automáticos
Para entender o funcionamento detalhado, consulte:
Sensores Analógicos
O sistema deve incluir ao menos um sensor analógico adicional, cuja leitura será enviada para o PC e exibida graficamente em tempo real.
Exemplos de sensores disponíveis:
Consulte mais opções em:
Interface Gráfica
A Interface Homem-Máquina (IHM) é o elo entre o usuário e o sistema embarcado.
Neste laboratório, o foco é desenvolver uma interface gráfica (GUI) no PC capaz de interagir, em tempo real, com o sistema embarcado via UART.
Essa interface será responsável por:
- Enviar comandos de controle aos servomotores (pan e tilt);
- Exibir graficamente os dados dos sensores analógicos;
- e fornecer feedback visual sobre o estado do sistema.
A IHM deve permitir uma interação intuitiva, oferecendo ao usuário uma visualização clara do comportamento do sistema físico. Ela pode ser desenvolvida em Processing ou Python, conforme sua preferência e familiaridade.
Funções principais da interface
Controle dos servomotores (Pan e Tilt)
- Deve possuir sliders ou botões que permitam ao usuário ajustar a posição de cada eixo.
- A interface deve enviar os ângulos desejados ao microcontrolador via UART, permitindo o controle suave e preciso do mecanismo pan-tilt.
Plotagem de dados do sensor
- A IHM deve exibir em tempo real o gráfico da leitura de um sensor analógico.
- O gráfico deve ser continuamente atualizado à medida que os dados são recebidos do sistema embarcado.
Sugestões de implementação
Python
- Utilize
PySerialpara comunicação eMatplotlibouPyQtGraphpara exibir o gráfico em tempo real. - Para construir a interface visual, pode usar
TkinterouPyQt5.
- Utilize
Processing
- Processing é uma linguagem e um ambiente de programação voltado à criação de interfaces gráficas e aplicações visuais interativas.
- Ele é amplamente utilizado em conjunto com o Arduino, pois ambos compartilham uma filosofia educacional e uma sintaxe muito semelhante baseada em C/C++.
- Essa integração facilita a comunicação entre o computador e a placa. Nessa relação, o Arduino executa o controle do hardware (como leitura de sensores e acionamento de servomotores), enquanto o Processing roda no PC e atua como a Interface Homem-Máquina (IHM), permitindo enviar comandos, visualizar dados e criar controles interativos.
- Abaixo há um vídeo demonstrando o desenvolvimento de uma aplicação utilizando Processing + Arduino:
Requisitos
Requisitos do laboratório:
- Construir um mecanismo Pan-Tilt utilizando dois servomotores.
- Controlar o Pan-Tilt através de uma Interface Homem-Máquina (IHM) no PC — implementada em Python ou Processing.
- Ler e processar pelo menos um sensor analógico adicional (por exemplo, LDR, termistor NTC, strain gauge ou SHARP).
- Transmitir as leituras do sensor via UART para a interface gráfica, com atualização em tempo real.
- Receber comandos de controle via UART enviados pela IHM para ajustar a posição dos servos.
- Implementar o sistema sob RTOS, utilizando tasks, queues e semáforos para organizar:
- Controle dos servos;
- Aquisição dos sensores;
- Comunicação serial.
- Garantir que o gráfico de leitura do sensor seja atualizado continuamente na IHM, representando o comportamento dinâmico da variável medida.
- Documentar o sistema (hardware e software) com diagrama de blocos e explicação do fluxo de dados entre microcontrolador ↔ PC.
Dicas
- Imprima o suporte Pan-Tilt (sugestão: Thingiverse - Pan Tilt).
- Implemente uma comunicação UART para enviar e receber dados da Pico:
PAN:ppp - TILT:ttt: indica a posição dos servomotores em graus 000° e 179°
SENSOR:sss : Indica a leitura do sensor (leitura direta do valor analógico, sem ou com tratamento)- Implementar o sistema com RTOS.