
Lab 7 - I2C - Prática 70% da nota do lab
Neste laboratório iremos substituir o joystick analógico por uma IMU para implementarmos um "pointer" (esses usados para apresentacão!). Como o spotlight da logitech.
Para isso, vocês precisarão de:
| Lista de Materiais | Valor |
|---|---|
| 1x MPU6050 | R$ 20,00 |
| 1x LED PWM | R$ 0,50 |
INFO
Você devem utilizar o mesmo python do lab passado (porém vão precisar alterar ele).

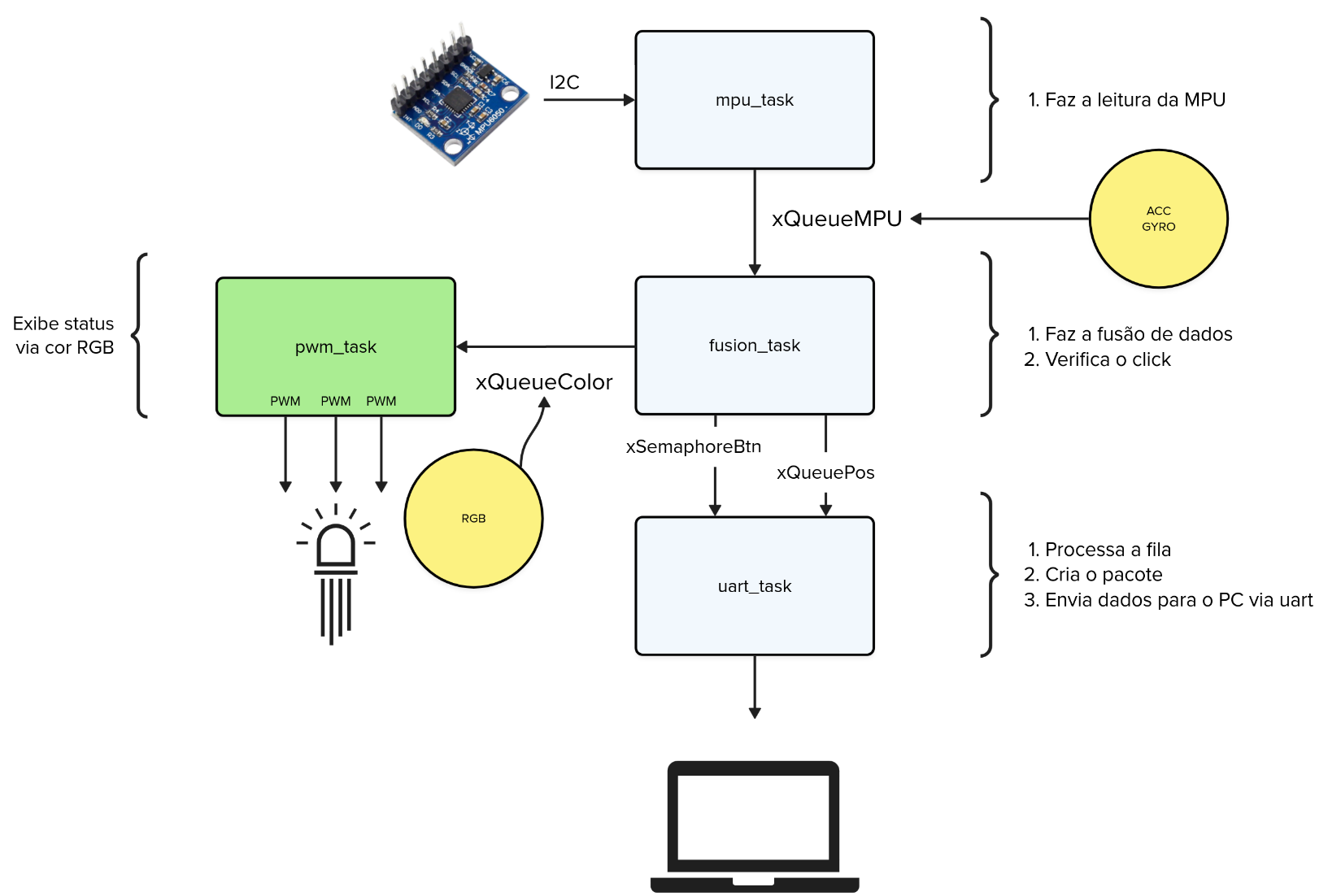
mpu_task: Faz a leitura da aceleracao e do giroscópio e envia os dados para a filaxQueueMPUxQueueMPU: Fila que possui os dados de aceleração e de giroscópiofusion_task: Task que faz a fusão de dados, detecta o click e formata a corxQueueColor: Fila que recebe um dadorgbe exibe no LED (via pwm)xQueuePos: Fila que possui os dadosxeyque irão movimentar o mousexSemaphoreBtn: Semáforo que indica que o botão foi pressionadouart_task: Task que faz o envio dos dados para UART
Requisitos
No lugar do joystick, agora você deve fazer a leitura da IMU6050 formatar os dados corretamente e enviar via serial para a leitura do programa python.
Vocês precisarão implementar um "mouse click", que deve ser acionado quando o sistema embarcado perceber uma movimentação repentina na horizontal no sentido para frente, como se estivesse "cutucando o ar". Para isso vão precisar identificar esse tipo de movimentação e fazer o envio para o python (que deverá ser modificado).
Além do mouse click, você deverão implementar o controle de um led RGB que deverá mudar de cor dado a orientacão do controle.
Siga o diagrama detalhado a seguir:
Firmware fornecido
O Firmware fornecido é inspirado no exemplo oficial da raspberrypi pico para o sensor MPU6050, modificado para fazer uso do Freertos, a conexão deve ser a mesma da indicada no repositório do fabricante:

O firmware faz leituras periódicas do sensor e imprime os valores de aceleração, giro e temperatura (interna do chip) no terminal:
while(1) {
mpu6050_read_raw(acceleration, gyro, &temp);
vTaskDelay(pdMS_TO_TICKS(10));
}WARNING
Se você for utilizar a PICO DOCK, você deve alterar os pinos do I2C:
-const int I2C_SDA_GPIO = 4;
-const int I2C_SCL_GPIO = 5;
+const int I2C_SDA_GPIO = 17;
+const int I2C_SCL_GPIO = 16;E utilizar esses pinos novos para conectar a MPU6050.
Os pinos originais 4 e 5 estão conectados aos botões da placa, e nesse botões colocamos um capacitor para realziar o deboucing, por conta disso o barramento I2C não funciona!
TIP
Execute o código exemplo fornecido, abra o terminal e verifique se ele funciona (envia dados na UART).
- Analisando os dados enviados, você é capaz de extrair alguma infomaćão?
Fusão de dados
Os dados brutos de aceleração e giro não são muito fáceis de se usar, pois precisam ser "fundidos" para fornecerem informacoes mais úteis, uma dessas informacoes que podemos obter da fusão dos dados é chamada de "orientacão" (roll, pitch e yaw).

Existem diversos algortímos que realizam essa fusão de dados, e IMUs mais poderosas podem fazer isso internamente, mas não é o caso da nossa (IMUs que fazem fusão são um pouco mais caras!). Para obtermos a orientacão iremos usar uma biblioteca escrita em C para sistemas embarcados chamada de xioTechnologies/Fusion. A biblioteca já foi importada para vocês no projeto, mas ainda não foi utilizada.
A lib que iremos utilizar é a:
A seguir um exemplo de como ler a MPU e realizar a fusão dos dados:
void mpu6050_task(void *p) {
// ....
// configuracao da mpu e i2c
FusionAhrs ahrs;
FusionAhrsInitialise(&ahrs);
while (true) {
mpu6050_read_raw(acceleration, gyro, &temp);
FusionVector gyroscope = {
.axis.x = gyro[0] / 131.0f, // Conversão para graus/s
.axis.y = gyro[1] / 131.0f,
.axis.z = gyro[2] / 131.0f,
};
FusionVector accelerometer = {
.axis.x = acceleration[0] / 16384.0f, // Conversão para g
.axis.y = acceleration[1] / 16384.0f,
.axis.z = acceleration[2] / 16384.0f,
};
FusionAhrsUpdateNoMagnetometer(&ahrs, gyroscope, accelerometer, SAMPLE_PERIOD);
const FusionEuler euler = FusionQuaternionToEuler(FusionAhrsGetQuaternion(&ahrs));
printf("Roll %0.1f, Pitch %0.1f, Yaw %0.1f\n", euler.angle.roll, euler.angle.pitch, euler.angle.yaw);
vTaskDelay(pdMS_TO_TICKS(10));
}Atenção!
- Notem que a lib necessita saber a taxa de amostragem!
SAMPLE_PERIOD, vocês precisam ajustar com o valor de vocês! - Esse exemplo não faz uso de bussolá (pois nossa IMU não possui), isso acrescenta um drift no resultado, ou seja, mesmo com a IMU parada vamos notar um "movimento" (a bussolá tenta corrigir isso).
LED RGB
O LED RGB possibilita que tenhamos uma combinação de cores para representar o estado de orientação do controle de forma visual e imediata. O objetivo final é que o LED RGB funcione como uma extensão da interface: além de enviar os dados para o Python e detectar o clique, o sistema também deve comunicar visualmente a orientação do dispositivo.
Para isso vocês deverão controlar as cores do LED a partir dos ângulos de roll e pitch calculados pela fusão de dados. A ideia é que o LED funcione como um indicador intuitivo da inclinação do dispositivo, permitindo que a cor mude conforme o controle é inclinado para diferentes direções.
Uma sugestão de mapeamento é:
- inclinação para a esquerda: aumentar o componente azul;
- inclinação para a direita: aumentar o componente vermelho;
- inclinação para frente: aumentar o componente verde;
Vocês podem escolher a estratégia de mapeamento que fizer mais sentido, desde que a cor varie de forma consistente com a orientação do controle. O importante é que a relação entre orientação e cor seja perceptível e reproduzível.
Como o LED é do tipo RGB, será necessário controlar os três canais independentemente por LED. Também é interessante suavizar as transições de cor, para que o LED não fique “pulando” entre tons muito diferentes a cada amostra (podem usar a média móvel).
Python
Vocês devem modificar o programa em python para que ele identifique quando houve um click do mouse e "aperte" o botão.