
Lab 3 - Timer - Prática 70% da nota do lab
Neste laboratório, aplicaremos os conceitos de timer para realizar a leitura de um sensor de distância e criar um datalogger.
Materiais
Para isso, você vai precisar de:
| Lista de Materiais | Valor |
|---|---|
| 1x HC-SR04 | R$ 14,00 |
| Resistores |
Lab
Qualidade de código
Não se esqueça de já programar pensando na qualidade de código! Agora ele vai começar a apitar na cabeça de vocês!
O sistema deve fazer a interface com o módulo de ultrasom, fazer a leitura de forma periódica e enviar os valores pela UART. Além disso, o sistema deve poder ser configurado via um terminal.
HC-SR04
O sensor opera com tensão de 5V, mas nossa placa trabalha com 3V3. Por conta disso será necessário:
- Ligar o HC-SR04 no 5V VBUS
- Fazer um divisor resistivo no pino do
ECHO - Trigger não precisa fazer nada!
Pin X:Echoliga na RP2040!Pin Y:Triggerliga na RP2040!

SEM PULL-UP
O HC-SR04 é um sensor ativo, por isso não devemos ativar o pullup no pino do ECHO!
Trigger
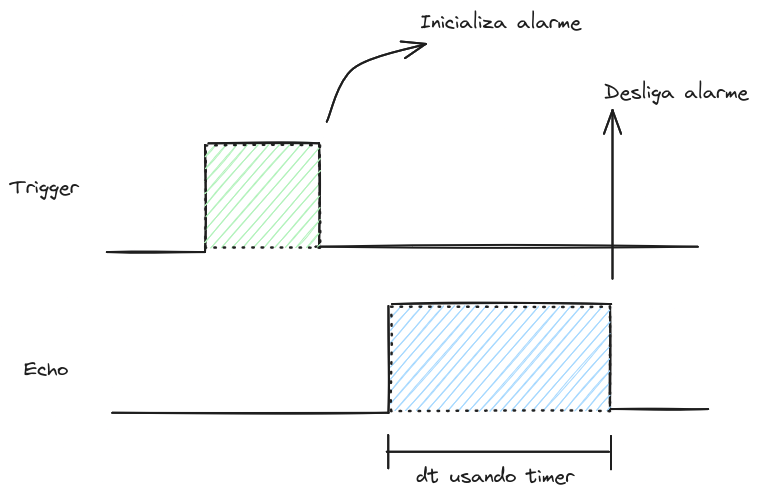
Se o sistema estiver ativado, você deve gerar um pulso no pino trigger (pesquise o tempo do pulso), isso vai fazer com que o sensor comece a leitura.
Echo
Para detectar quanto tempo o pino do echo ficou em 1, configure uma IRQ de subida e descida no GPIO que está conectado ao pino. Utilize a API de tempo absoluto para calcular o DT entre a subida e a descida do pino.
Falha
O sensor não é perfeito e muitas vezes falha, por isso você deve implementar um mecanismo de detecção de falhas, ele deve funcionar detectando quando o echo não fica por um tempo em 1. Para isso utilize um alarme de timer como indicado a seguir:
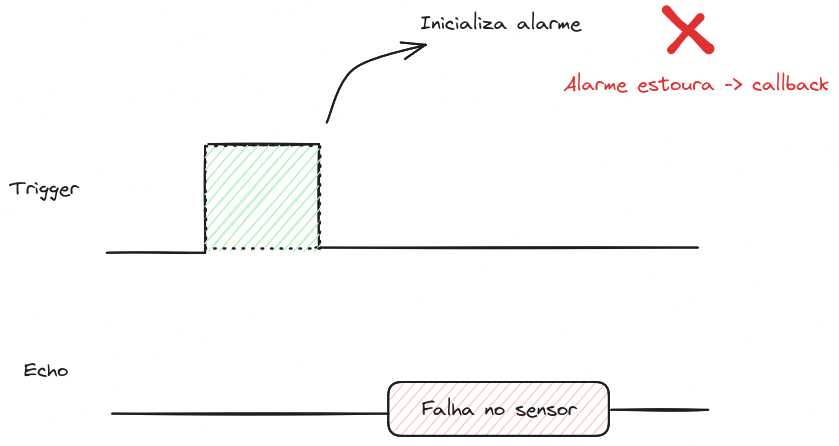
Leitura com erro
A imagem a seguir ilustra uma falha no sensor. Nesse caso, o alarme estoura e o sistema fornece uma mensagem de erro.
Terminal
O usuário deve ser capaz de controlar algumas opções do sistema pelo terminal:
Start: Inicializa a leitura.Stop: Para a leitura.Período: Frequência na qual a leitura vai ser realizada (em segundos).
Em modo start, o sistema deve produzir um log no terminal com um tick atualizado a cada 3s (padrão) indicando quando a leitura foi realizada e o valor da distância ou se aconteceu algum erro:
3s - 100 cm
6s - 89 cm
9s - 70 cm
12s - 50 cm
....
-300s - Falha
-303s - FalhaResultado
A seguir, o resultado esperado deste lab.
Dicas
A seguir, algumas dicas de como fazer. Você pode ou não seguir:
- Comece pela leitura do sensor (imprima o resultado na serial).
- Para cancelar um alarme, use
cancel_alarm(alarm);
- Para cancelar um alarme, use
- Implemente a detecção de falha.
- Para testar, basta desconectar qualquer fio do sensor!
- Realize a leitura do sensor a cada 3s
- Crie um timer periódico de 3s que vai gerar a referencia de quando o sensor deve ser lido.
- Implemente a parte de leitura da serial.
Leitura de dados
Para ler dados da serial/terminal sem que o programa fique travado para sempre esperando um dado:
// Return a character from stdin if
// there is one available within a timeout.
int caracter = getchar_timeout_us (uint32_t timeout_us)Consulte a documentação para outras funções relacionadas ao stdio:
- Implemente a configuração via UART do periódo de amostragem.
Desafios extras
Gostou e quer fazer mais? Que tal:
- Pense em uma forma de calibrar o sensor.
- Tente ler dois sensores ao mesmo tempo.
- Modo alerta, se a distância chegar a um limite gere um som de alarme!
- Crie um código em python para plotar o valor.
- Exibir no display OLED a distância.