PWM
Pulse Width Modulation (PWM) é uma forma de onda digital periódica que permite modular o tempo em que o sinal permanece em nível alto.
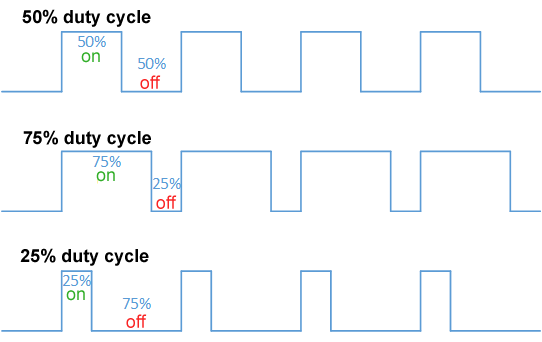
Duty Cycle é o termo utilizado para indicar quanto tempo o sinal do PWM permanece em nível alto. Um Duty Cycle de 40% indica que o sinal fica por 40% do tempo em nível alto e 60% em nível baixo.
Um aspecto muito importante no PWM, e que é pouco abordado, é a frequência na qual o sinal será gerado. Se a frequência for muito baixa, o sistema que estamos controlando pode não se comportar como esperado. Por exemplo, um motor pode vibrar se a frequência do PWM for muito baixa. É importante não confundir frequência com o Duty Cycle, são conceitos independentes!
Com essa modulação, conseguimos controlar uma série de sistemas:
- Motor DC: É uma forma fácil de controlarmos a tensão média no motor, controlando, por sua vez, a sua velocidade.
- LED: Conseguimos controlar a intensidade do LED.
- Forno: Com o PWM, conseguimos controlar a temperatura de um forno elétrico.
Somos capazes de gerar um sinal PWM via software, mas isso não é muito eficiente:
// PWM de 33% de duty cycle via software
while(1) {
gpio_put(PWM_PIN, 1);
sleep_ms(2);
gpio_put(PWM_PIN, 0);
sleep_ms(4);
}
O nosso microcontrolador possui um periférico dedicado a gerar sinais de PWM:

Do manual do RP2040, podemos extrair a informação de que o periférico é capaz de gerar 16 sinais independentes de PWM em qualquer um dos pinos do GPIO:
The RP2040 PWM block has 8 identical slices. Each slice can drive two PWM output signals, or measure the frequency or duty cycle of an input signal. This gives a total of up to 16 controllable PWM outputs. All 30 GPIO pins can be driven by the PWM block.
SDK
Para usar o PWM você deve modificar o CMakeLists.txt adicionando hardware_pwm no target_link_libraries:
E adicionar no headfile:
Snippets
Códigos exemplo para o PWM.
Hello PWM
O exemplo a seguir configura o pino GP28 para operar com um PWM de 1Mhz com 100 possíveis níveis de Duty Cycle e configura o pino para operar com um Duty Cycle de 40%.
Simulação no wokwi / pico-examples/pwm/hello_pwm
/**
* Copyright (c) 2020 Raspberry Pi (Trading) Ltd.
*
* SPDX-License-Identifier: BSD-3-Clause
*/
// Output PWM signals on pins 0 and 1
#include "pico/stdlib.h"
#include "hardware/pwm.h"
const int PWM_0_PIN = 28;
int main() {
// Tell GPIO they are allocated to the PWM
gpio_set_function(PWM_0_PIN, GPIO_FUNC_PWM);
// Find out which PWM slice is connected to GPIO
uint slice_num = pwm_gpio_to_slice_num(PWM_0_PIN);
// pwm freq
pwm_set_clkdiv(slice_num, 125); // pwm clock should now be running at 1MHz
// Set period of 100 cycles (0 to 99 inclusive)
pwm_set_wrap(slice_num, 100);
// Set channel A output high for one cycle before dropping
// PWM set to 30%
pwm_set_chan_level(slice_num, PWM_CHAN_A, 70);
// Set the PWM running
pwm_set_enabled(slice_num, true);
while(1){
}
}
Múltiplos PWMs
Criamos uma função que auxiliar no uso de múltiplos PWMs, o problema é saber qual CHANNEL cada PWM vai ser alocado, a função a seguir retorna o slice e o channel relativo ao PWM do pino. o init_pwm possui como argumento:
pwm_pin_gp: O GPIO que deseja configurar o PWMresolution: A resolucão do pwm:100: vai de0a99,256: vai de0a255slice_num: Retorna o slice alocao para o pinochan_num: Retorna o channel alocao para o pino
A demo a seguir faz um fade nos pinos GP27 e GP15.
#define PWM_GP27
#define PWM_GP15
void init_pwm(int pwm_pin_gp, uint resolution, uint *slice_num, uint *chan_num) {
gpio_set_function(pwm_pin_gp, GPIO_FUNC_PWM);
uint slice = pwm_gpio_to_slice_num(pwm_pin_gp);
uint chan = pwm_gpio_to_channel(pwm_pin_gp);
pwm_set_clkdiv(slice, 125); // pwm clock should now be running at 1MHz
pwm_set_wrap(slice, resolution);
pwm_set_chan_level(slice, PWM_CHAN_A, 0);
pwm_set_enabled(slice, true);
*slice_num = slice;
*chan_num = chan;
}
void main() {
int pwm_0_slice, pwm_1_chan;
int pwm_1_slice, pwm_1_chan;
init_pwm(PWM_GP27, 256, &pwm_0_slice, &pwm_0_chan);
init_pwm(PWM_GP15, 256, &pwm_1_slice, &pwm_1_chan);
while(1) {
for (int i=0; i < 256; i++){
pwm_set_chan_level(pwm_0_slice, pwm_0_chan, i);
pwm_set_chan_level(pwm_1_slice, pwm_1_chan, 256 - i);
sleep_ms(10);
}
}
}