
Corsi
Symmetric Multiprocessing (SMP)
Existem diversos jeitos de usarmos um RTOS com microprocessador multicore. Dois métodos populares são o Asymmetric Multiprocessing (AMP) e o Symmetric Multiprocessing (SMP), como indicado a seguir:
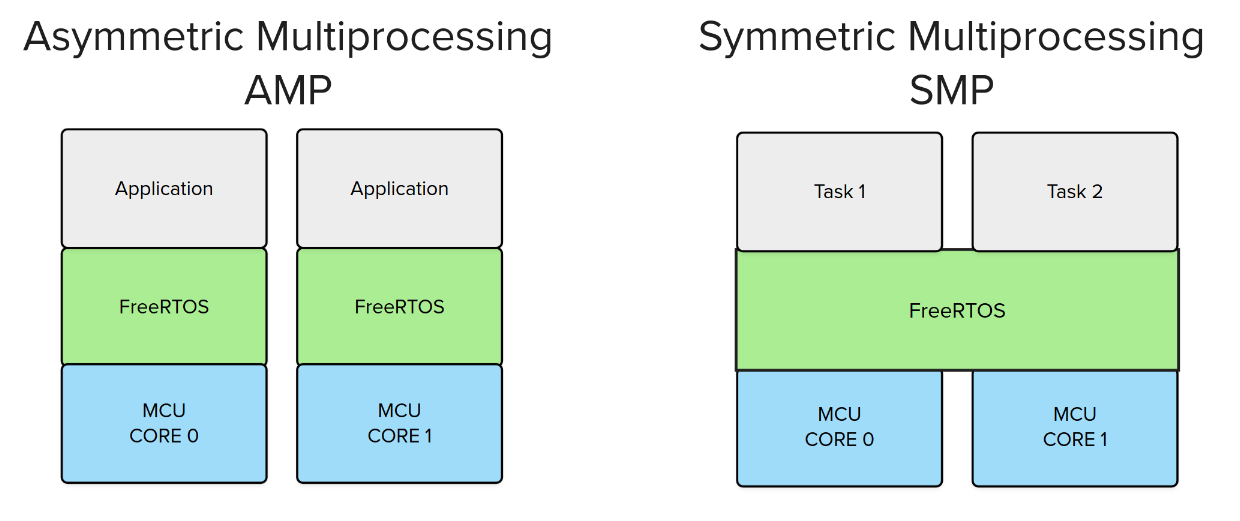
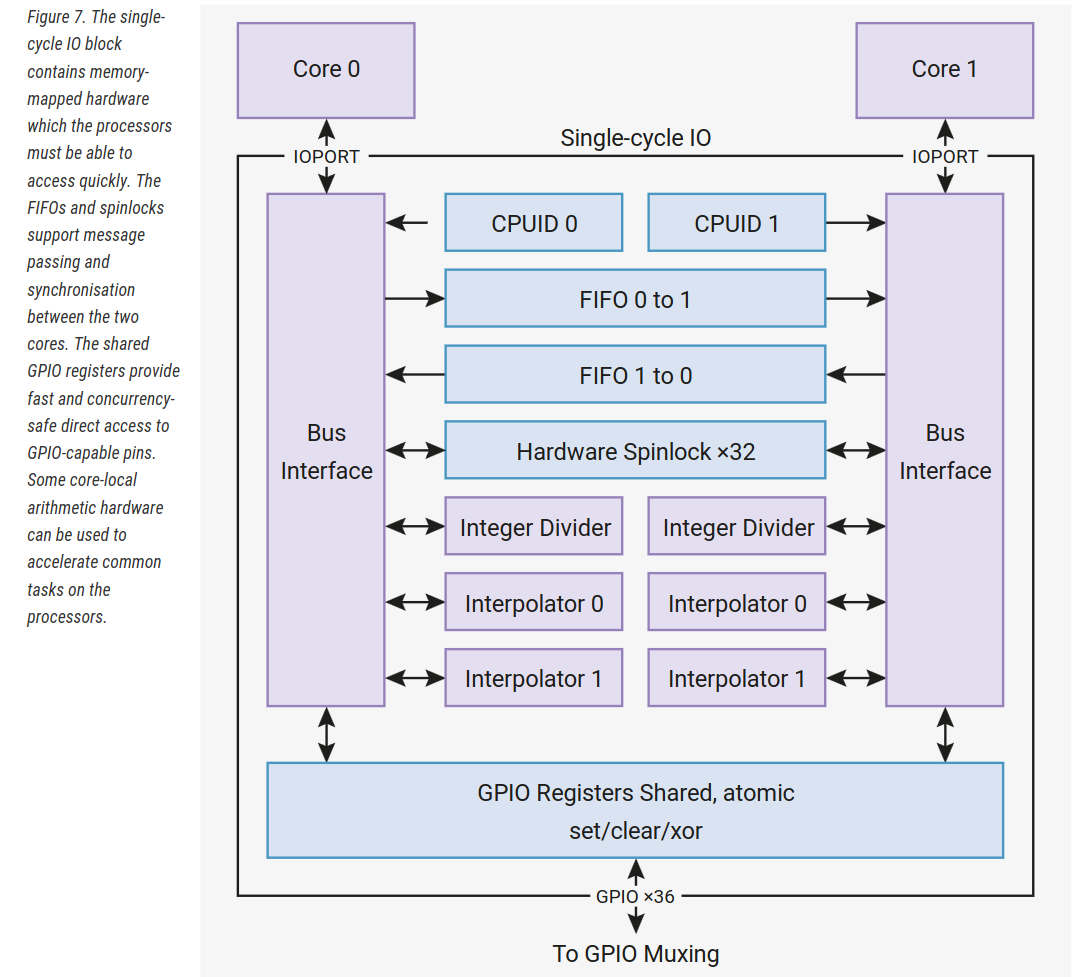
A primeira alternativa (AMP) consiste em executar dois FreeRTOS independentes em cada um dos processadores do microcontrolador, onde cada RTOS pode possuir suas próprias tasks. A comunicação entre as tasks de diferentes cores pode ser complicada; uma solução é o uso do recurso que o RP2040 fornece para comunicação entre os COREs, utilizando uma FIFO:
Até agora nós temos utilizado um único CORE da CPU, ignorando o outro completamente.
SMP
A segunda solução é executar um único FreeRTOS entre os dois COREs, o que simplifica bastante, já que toda a parte de baixo nível fica sob a responsabilidade do FreeRTOS. Assim, o scheduler do FreeRTOS vai alocar uma tarefa por CORE. O FreeRTOS recentemente fez merge na branch principal de uma atualização que adiciona suporte ao symmetric multiprocessing (SMP), permitindo o agendamento e distribuição de tarefas entre processadores idênticos de um microcontrolador multicore.
No SMP, existem quatro chamadas de função do FreeRTOS que deverão ser tratadas:
vTaskCoreAffinitySet(handle, mask): Fixa uma tarefa em um core específico. Na máscara, usar:- Core
0com a máscara1 << 0e Core1com a máscara1 << 1.
- Core
vTaskCoreAffinityGet(handle): Retorna a qual CORE a tarefa foi atribuída.
!!! tip Você não precisa necessariamente associar uma task a um core; você pode deixar o escalonador decidir isso.
Para mais informações, consulte o site do FreeRTOS sobre o SMP:
FreeRTOSConfig.h
INFO
Esta configuração só funciona com versões específicas do FreeRTOS. Use como base o código:
Para ativarmos o SMP em nossos projetos, precisamos editar o arquivo main/CMakeList.txt e defirmos agora que iremos trabalhar com 2 cores:
diff
target_compile_definitions(pico_emb PRIVATE
- configNUMBER_OF_CORES=1
+ configNUMBER_OF_CORES=2
)Isso modifica a configuração do FreeRTOS, analise o arquivo FreeRTOSConfig.h que está na mesma pasta, a modifição irá alterar:
diff
#if FREE_RTOS_KERNEL_SMP // set by the RP2xxx SMP port of FreeRTOS
/* SMP port only */
#ifndef configNUMBER_OF_CORES
#define configNUMBER_OF_CORES 2
#endif
+#define configNUM_CORES configNUMBER_OF_CORES
#define configTICK_CORE 0
#define configRUN_MULTIPLE_PRIORITIES 1
#if configNUMBER_OF_CORES > 1
+#define configUSE_CORE_AFFINITY 1
#endif
#define configUSE_PASSIVE_IDLE_HOOK 0
#endifEssas configurações fazem o seguinte: configNUMBER_OF_CORES 2 define para o FreeRTOS quantos cores irão ser utilizados. Se o valor for maior que 1, o SMP será ativado. Já o configUSE_PASSIVE_IDLE_HOOK 0 indica que não queremos ter uma função de callback que será ativada sempre que não existir uma task a ser executada. O configTICK_CORE define qual CORE irá lidar com os ticks que o RTOS necessita para chamar o scheduler.
Se configRUN_MULTIPLE_PRIORITIES for configurado como 0, então apenas tarefas de prioridades iguais vão executar simultaneamente. Ou seja, se apenas uma tarefa de alta prioridade precisar executar, um dos COREs ficará ocioso. E por último, o configUSE_CORE_AFFINITY 1 diz que podemos atribuir manualmente uma task a um CORE específico!
Code Snippets
Atribuindo três tasks, a primeira ao CORE_0 e as demais ao CORE_1:
c
#define CORE_0 (1 << 0)
#define CORE_1 (1 << 1)
void main() {
// ...
TaskHandle_t xHandle1;
TaskHandle_t xHandle2;
TaskHandle_t xHandle3;
xTaskCreate(vTask1, "task1", STACK_SIZE, NULL, tskIDLE_PRIORITY + 1, &( xHandle1 ) );
xTaskCreate(vTask2, "task2", STACK_SIZE, NULL, tskIDLE_PRIORITY , &( xHandle2 ) );
xTaskCreate(vTask3, "task3", STACK_SIZE, NULL, tskIDLE_PRIORITY , &( xHandle3 ) );
vTaskCoreAffinitySet( xHandle1, CORE_0 );
vTaskCoreAffinitySet( xHandle2, CORE_1 );
vTaskCoreAffinitySet( xHandle3, CORE_1 );
}