
Corsi
Pico - W
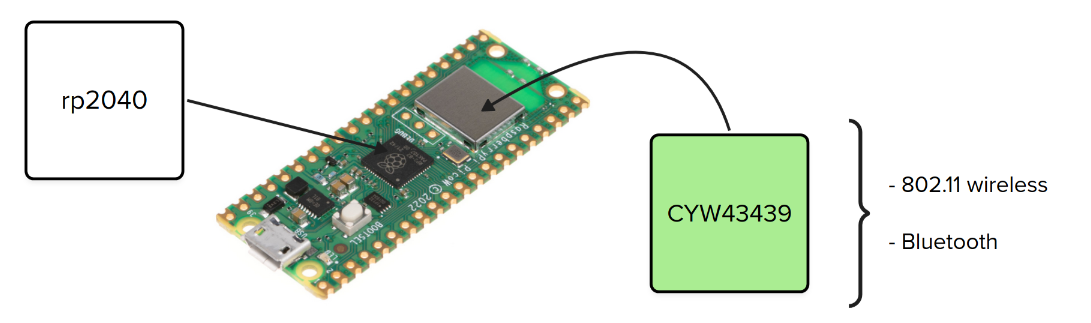
O Raspberry Pi Pico e o Pico W são bem semelhantes. Para a grande maioria dos projetos não haverá diferença, tanto que até o momento não havíamos falado da existência dessa versão Pico W. O Raspberry Pi Pico W é uma versão do Pico que inclui conectividade wireless de 2.4GHz, isso abre oportunidades para uma variedade maior de aplicações.
Chip CYW43439
Ambas as versões, Pico e Pico W, utilizam o mesmo microcontrolador RP2040. A principal diferença está na inclusão do chip CYW43439 da Infineon no Pico W, que adiciona as seguintes funcionalidades wireless:
- WiFi 4 (802.11n), Single-band (2.4 GHz)
- WPA3
- SoftAP (Até 4 clientes)
- Bluetooth 5.2
- Suporte para Bluetooth LE Central and Peripheral roles
- Suporte para Bluetooth Classic
Na Pico W, alguns pinos internos (usuário não tem acesso) são direcionados para comunicação com o CYW43439 e foram substituídos pelo GPIO presente no CY43439. Esses podem ser controlados pelo usuário, são eles:
WL_GPIO2– (Entrada) Sentido VBUS. ALTO quando VBUS está presente (Veja o datasheet)WL_GPIO1– (Saída) Controla o pino SMPS Power Save integrado (Veja o datasheet)WL_GPIO0– (Saída) Controla o LED On-board
WARNING
O led on-board é controlado pelo GPIO25 no Pico padrão. No Pico W, este GPIO é usado para comunicação com o módulo wireless, mas o controle do LED pode ser feito pelo pino WL_GPIO0 do módulo wireless.
WIFI
Vamos utilizar a interface do CYW43439 para fazer um pisca led. O intuito é entender as configurações básicas para desenvolvimento de aplicações utilizando a versão Pico W.
INFO
Consulte a página do site da disciplina Consulta/pico-examples para saber como usar o repositório de exemplos da pico!
SDK
Para desenvolver aplicações utilizando o Pico W, vamos utilizar o projeto infra-test, mas você pode basear-se em qualquer projeto desenvolvido para o Pico até o momento e fazer as modificações:
- O arquivo
CMakeLists.txtque está na raiz do projeto (onde fica a pasta build). DefinaPICO_BOARDcomopico_w:
diff
set(PICO_BOARD pico_w)- Já no arquivo
CMakeLists.txtdentro da pasta do projeto (onde está o arquivomain.c) e adicionepico_cyw43_arch_nonenotarget_link_libraries:
diff
target_link_libraries(
....
.....
pico_cyw43_arch_none)No arquivo main.c adicione no headfile:
c
#include "pico/cyw43_arch.h"Hello World
Um exemplo completo de um blink led:
pico-examples/blob/master/pico_w/wifi/blink/picow_blink.c
c
#include <stdio.h>
#include "pico/stdlib.h"
#include "pico/cyw43_arch.h" // específica do Pico W, interface wireless
int main() {
stdio_init_all();
//inicializa o módulo wireless CYW43439.
//Se a inicialização falhar, a função retorna um valor não zero, e o programa imprime uma mensagem de erro e termina.
if (cyw43_arch_init()) {
printf("Wi-Fi init failed");
return -1;
}
while (true) {
cyw43_arch_gpio_put(CYW43_WL_GPIO_LED_PIN, 1);
sleep_ms(250);
cyw43_arch_gpio_put(CYW43_WL_GPIO_LED_PIN, 0);
sleep_ms(250);
}
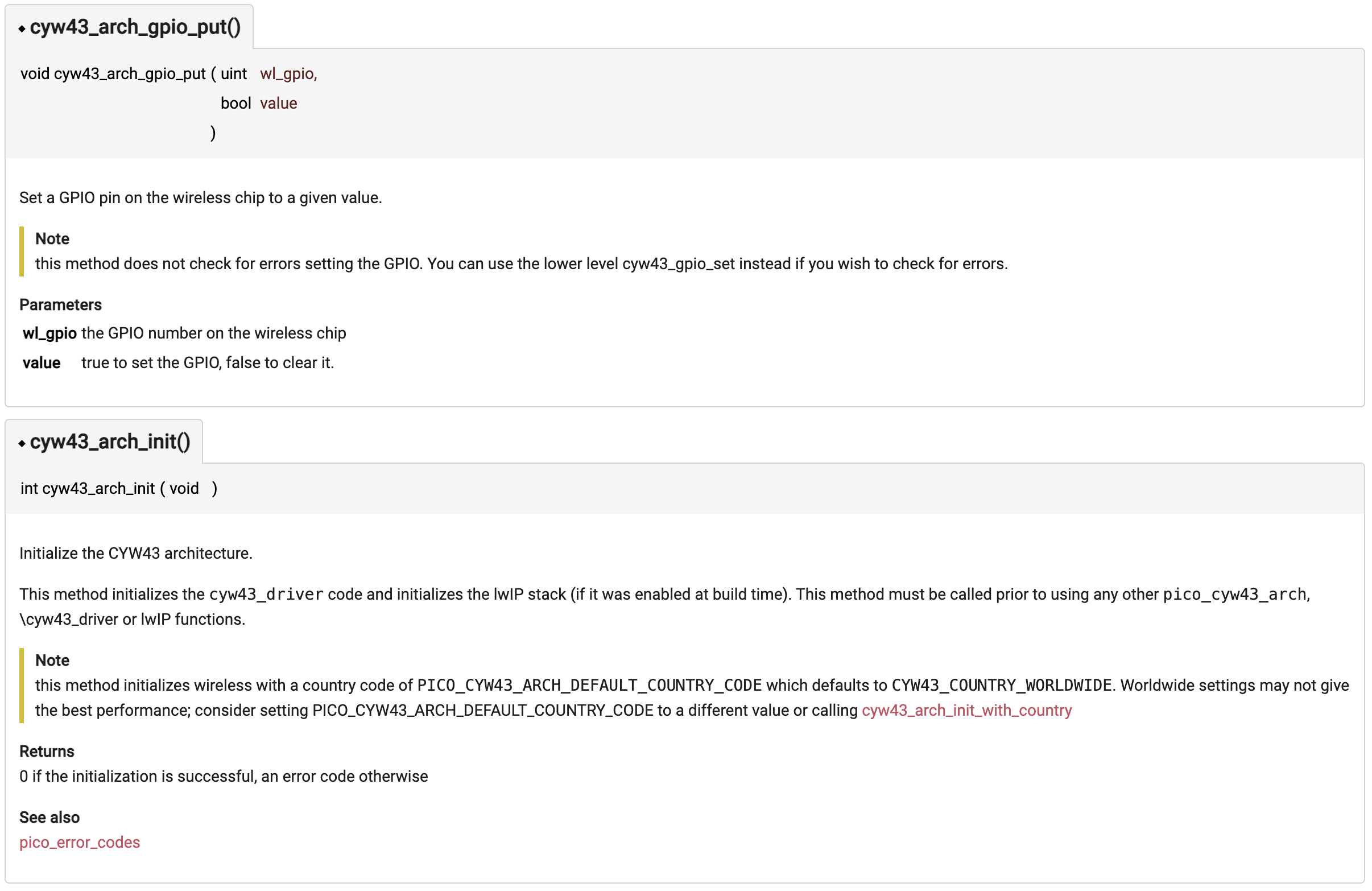
}- A função
cyw43_arch_gpio_put()é chamada para definir o estado do LED (ligado ou desligado). - É definido neste arquivo: https://github.com/raspberrypi/pico-sdk/blob/master/src/rp2_common/pico_cyw43_arch/cyw43_arch.c
- O LED é controlado diretamente através do pino
CYW43_WL_GPIO_LED_PIN. É definido neste arquivo: https://github.com/raspberrypi/pico-sdk/blob/master/src/boards/include/boards/pico_w.h
TIP
Acesse a documentação SDK Oficial para ter mais detalhes: https://lorenz-ruprecht.at/docu/pico-sdk/1.4.0/html/index.html
Wifi e Bluetooth
- Para exemplos de utilização do WiFi e Bluetooth, recomenda-se consultar documentações específicas e tutoriais que exploram essas funcionalidades em projetos práticos.
pico-examples/blob/master/pico_w/
Snippets
Snippets de código para o WIFI.
Scan Wi-fi
Vamos implementar uma scan para listar as redes wifi disponíveis para se conectar. O código é adaptado do repositório oficial da raspiberry pi pico W.
C
#include <stdio.h>
#include "pico/stdlib.h"
#include "pico/cyw43_arch.h"
// Função de callback para resultados de escaneamento de Wi-Fi
static int scan_result(void *env, const cyw43_ev_scan_result_t *result) {
if (result) {
// Exibe informações sobre a rede Wi-Fi encontrada
printf("SSID: %-32s RSSI: %4d Canal: %3d MAC: %02x:%02x:%02x:%02x:%02x:%02x Segurança: %u\n",
result->ssid, result->rssi, result->channel,
result->bssid[0], result->bssid[1], result->bssid[2],
result->bssid[3], result->bssid[4], result->bssid[5],
result->auth_mode);
}
return 0;
}
int main() {
stdio_init_all(); // Inicializa todas as interfaces padrão de I/O
// Inicializa o módulo Wi-Fi
if (cyw43_arch_init()) {
printf("Falha ao inicializar\n");
return 1;
}
// Habilita o modo estação (STA)
cyw43_arch_enable_sta_mode();
// Variáveis para controle de tempo e status de escaneamento
absolute_time_t scan_test = nil_time;
bool scan_in_progress = false;
while (true) {
if (absolute_time_diff_us(get_absolute_time(), scan_test) < 0) {
if (!scan_in_progress) {
// Configura e inicia um escaneamento de Wi-Fi
cyw43_wifi_scan_options_t scan_options = {0};
int err = cyw43_wifi_scan(&cyw43_state, &scan_options, NULL, scan_result);
if (err == 0) {
printf("\nRealizando escaneamento de Wi-Fi\n");
scan_in_progress = true;
} else {
printf("Falha ao iniciar escaneamento: %d\n", err);
scan_test = make_timeout_time_ms(10000); // Aguarda 10s e tenta novamente
}
} else if (!cyw43_wifi_scan_active(&cyw43_state)) {
scan_in_progress = false;
scan_test = make_timeout_time_ms(10000); // Aguarda 10s e tenta novamente
}
}
}
cyw43_arch_deinit(); // Desliga o módulo Wi-Fi antes de encerrar
return 0;
}cyw43_arch_enable_sta_mode(): O dispositivo atua como um cliente Wi-Fi.cyw43_wifi_scan_options_t(): De acordo com a documentação oficial, atualmente as opções desse argumento são ignoradas.cyw43_wifi_scan(): Este método inicia o processo de escaneamento por redes Wi-Fi disponíveis. Ele utiliza as configurações de escaneamento e requer uma função de callback (quarto parametro) para lidar com os resultados encontrados durante o escaneamento.cyw43_wifi_scan_active(): Verifica se um escaneamento de redes Wi-Fi está ativo no momento. Retornatruese um escaneamento estiver em andamento efalsecaso contrário, ajudando a gerenciar o fluxo de controle em aplicações que dependem do status do escaneamento.scan_result: A função de callback pega o resultado e imprime seu conteúdo. OBSSID(Basic Service Set Identifier) da rede, que é o endereço MAC do ponto de acesso que transmite a SSID. É composto por 6 bytes, usualmente exibidos em formato hexadecimal.
Conectando-se na internet
WARNING
Eu gastei um tempinho até fazer os ajustes do cmake para compilar corretamente o exemplo de conexão wifi adaptado a seguir. Além da configuração normal para usar a pico_w, realizei as seguintes configurações:
- No
cmakelist.txtda pastamain: adicionetarget_include_directories(main PRIVATE ${CMAKE_CURRENT_LIST_DIR} ). - O suporte ao Wi-Fi na Pico W requer o uso das bibliotecas específicas fornecidas no SDK, por isso altere
pico_cyw43_arch_noneparapico_cyw43_arch_lwip_threadsafe_background.
Estou assumindo que você está compilando a pasta de projeto main, caso contrario substitua pelo nome da pasta do seu projeto.
- Na pasta de projeto main: criei uma cópida do arquivo
lwipopts_examples_common.hdo repositório de exemplos da pico para a pasta main com o nomelwipopts.h.
O código base a seguir irá tentar se conectar à internet, se for sucesso o led da placa acende.
C
#include <stdio.h>
#include "pico/stdlib.h"
#include "pico/cyw43_arch.h"
#define WIFI_SSID "your_wifi_ssid"
#define WIFI_PASSWORD "your_wifi_password"
int main() {
stdio_init_all();
// Inicializa o módulo Wi-Fi
if (cyw43_arch_init()) {
printf("Falha na inicialização do Wi-Fi\n");
return -1;
}
printf("Wi-Fi inicializado com sucesso\n");
// Ativa o modo de estação (STA)
cyw43_arch_enable_sta_mode();
// Tenta conectar ao Wi-Fi
int result = cyw43_arch_wifi_connect_blocking(WIFI_SSID, WIFI_PASSWORD, CYW43_AUTH_WPA2_MIXED_PSK);
// Verifica o resultado da conexão
if (result) {
printf("Conexão Wi-Fi falhou\n");
cyw43_arch_gpio_put(CYW43_WL_GPIO_LED_PIN, 0); // Desliga o LED
return -1;
}
// Se conectado com sucesso, acende o LED
printf("Conectado ao Wi-Fi com sucesso\n");
cyw43_arch_gpio_put(CYW43_WL_GPIO_LED_PIN, 1); // Acende o LED
// Mantém o programa rodando
while (true) {
printf("loop principal\n");
sleep_ms(1000);
}
}cyw43_arch_enable_sta_mode(): O dispositivo atua como um cliente Wi-Fi, o que significa que ele se conecta a uma rede Wi-Fi existente (como a de sua casa ou escritório).cyw43_arch_wifi_connect_blocking(): Esta função tenta estabelecer uma conexão Wi-Fi usando as credenciais fornecidas (SSID e senha) e tipo de autenticação. Ela bloqueará a execução do programa até que a conexão Wi-Fi seja estabelecida ou falhe. Isso significa que, se a conexão Wi-Fi demorar muito ou não for bem-sucedida, seu programa esperará indefinidamente, a menos que seja interrompido externamente.
De acordo com a documentação oficial, existem 4 tipos de autenticação: CYW43_AUTH_OPEN, CYW43_AUTH_WPA_TKIP_PSK, CYW43_AUTH_WPA2_AES_PSK, CYW43_AUTH_WPA2_MIXED_PSK.
Podemos realizar a conexão Wi-Fi da pico W tanto com função cyw43_arch_wifi_connect_blocking() como com a função cyw43_arch_wifi_connect_timeout_ms(), mas cada uma comporta-se de uma forma diferente.
cyw43_arch_wifi_connect_timeout_ms(): Esta função tenta estabelecer uma conexão Wi-Fi com um parâmetro adicional detime out(tempo limite) em milissegundos. Se a conexão não for bem-sucedida dentro do período especificado, ela retorna um erro. A duração do tempo limite permite especificar por quanto tempo o sistema deve tentar se conectar antes de desistir.
TIP
A escolha entre as funções para tentar estabelecer uma conexão Wi-Fi, depende dos requisitos de responsividade da sua aplicação e de como você deseja lidar com cenários em que a conectividade Wi-Fi está atrasada ou indisponível. Para aplicações onde você não pode se dar ao luxo de esperar indefinidamente, cyw43_arch_wifi_connect_timeout_ms() fornece uma maneira de falhar de forma controlada após um período definido. Por outro lado, cyw43_arch_wifi_connect_blocking() é mais simples de usar quando o tempo para estabelecimento da conexão Wi-Fi não é crítico para a continuação do programa.
O drive cyw43 possui a função cyw43_tcpip_link_status que retorna o status da conexão. As opções são:
| link status | Meaning |
|---|---|
CYW43_LINK_DOWN | Wifi down |
CYW43_LINK_JOIN | Connected to wifi |
CYW43_LINK_NOIP | Connected to wifi, but no IP address |
CYW43_LINK_UP | Connect to wifi with an IP address |
CYW43_LINK_FAIL | Connection failed |
CYW43_LINK_NONET | No matching SSID found (could be out of range, or down) |
CYW43_LINK_BADAUT | Authenticatation failure |
Vamos criar uma função get_wifi_status que recebe o retorno dessa opção, Vamos utilizar para garantir a conexão de rede.
C
void get_wifi_status(int status) {
if (status == CYW43_LINK_UP) {
printf("wifi on\n");
} else {
printf("wifi off\n");
}
}Para chamar a função:
C
get_wifi_status(cyw43_tcpip_link_status(&cyw43_state, CYW43_ITF_STA));Verificando seu IP
Após conectado é possível verificar o IP alocado para a raspberry pi Pico. Adicionando o techo de código a seguir na função get_wifi_status.
C
char sIP[] = "xxx.xxx.xxx.xxx";
strcpy (sIP, ip4addr_ntoa(netif_ip4_addr(netif_list)));
printf ("Conectado, IP %s\n", sIP);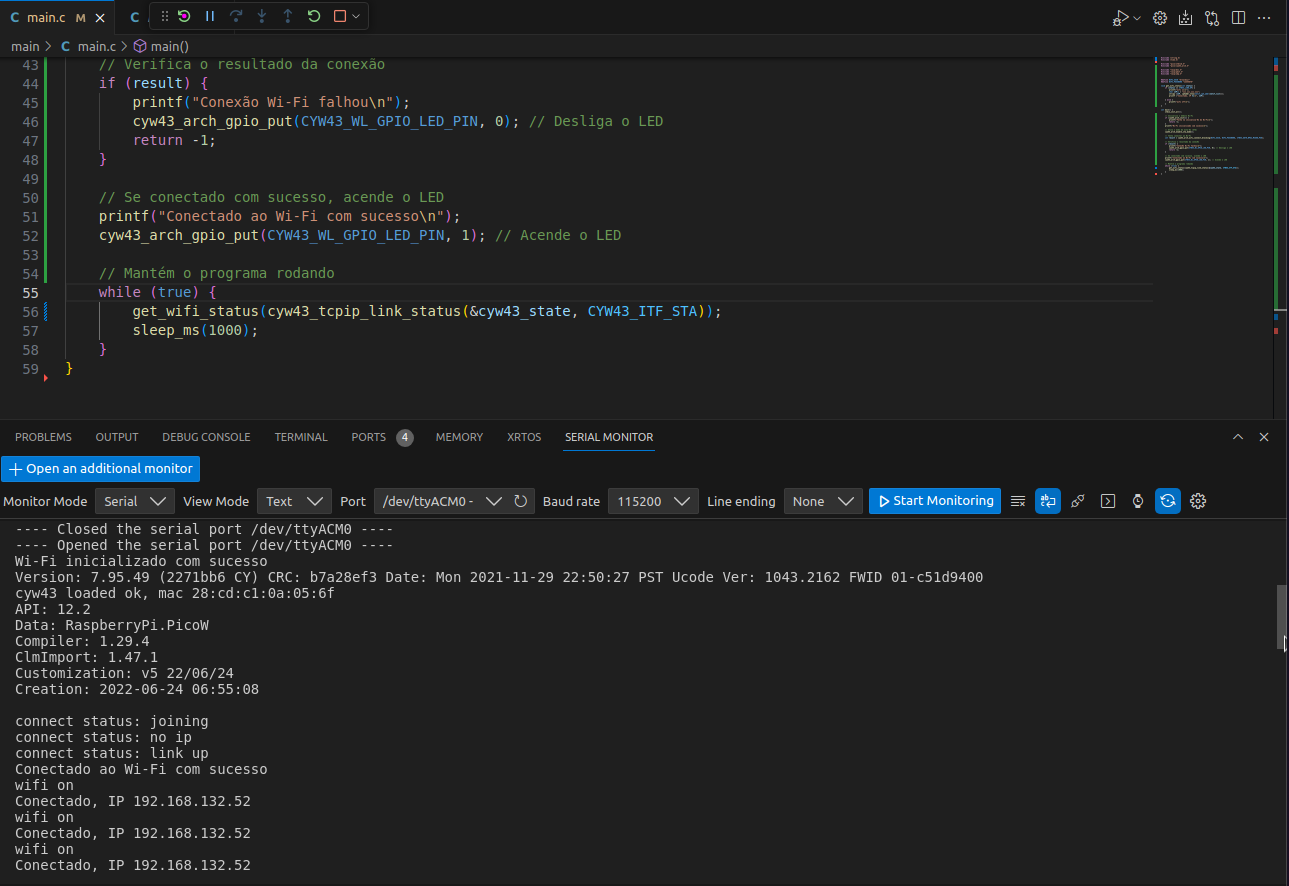
Próximmos passos
Agora você já está pronto para desbravar o mundo do WIFI explorando novas possibilidades.
Sugestão:
- Explore os exemplos de wifi do Consulta/pico-examples