GPIO
Material de apoio: sdk / datasheet
Utilizaremos o GPIO (General Purpose Input/Output) sempre que desejarmos controlar ou ler o estado de um pino digital por meio de código. Acionar um LED, ler o estado de um botão, controlar um motor de passo, ler um sensor de presença — todas essas ações podem ser realizadas através do uso deste periférico.
Um sinal digital é aquele que pode ser interpretado como binário: um ou zero, tem ou não tem, aceso ou apagado, etc. Em sistemas digitais, isso significa se o sinal possui ou não energia (aproximadamente 3V ou 0V).
Um microcontrolador pode precisar gerar um sinal digital em um de seus pinos (saída) ou ler um sinal digital que foi gerado externamente (entrada). Os microcontroladores modernos permitem configurar qualquer pino como entrada ou saída durante a execução do código.
É importante saber de antemão que, para controlar um LED, devemos configurar o pino como saída, ou para ler um botão, configurá-lo como entrada.
Segue uma pequena lista de atuadores/sensores que podem ser controlados digitalmente:
atuadores: LED, motores, relés, etc.sensores: Botões, sensor de movimento, etc.
Info
Usaremos o termo atuadores para tudo que o microcontrolador acionar/controlar e sensores para tudo que gerar informações para o microcontrolador (uC).
Periférico
O periférico é responsável por controlar digitalmente um pino da rp2040 e interligar os pinos aos periféricos internos do microcontrolador. Os pinos da rp2040 são divididos em dois bancos, porem um dos bancos é dedicado a leitura do programa de uma memória FLASH (QSPI bank), sobrando apenas o banco GPI0 para o desenvolvedor. Este banco possui 30 pinos (GPIO0 .. GPIO29) que podem ser usados tanto como entrada quanto como saída.
O GPIO opera como um mux, permitindo que outros periféricos internos do microcontrolador também acessem os pinos, como ilustrado na figura abaixo extraído do manual:

Warning
Conforme manual respeite a tensão máxima de 3.3V no pino da rp2040:

E a corrente máxima nos pinos (entrada ou saída) em 50mA:

Na prática?
Na rasp pico todos os pinos são nomeados com um nome: GP0, GP11, ..., e no software iremos utilizar apenas o número: 0, 1 para nos referenciarmos ao pino específico, para organizarmos melhor o software, iremos declarar uma variável global que define o número do pino:
Agora é necessário ativar o pino, isso é feito usando:
E então configurar se o pino vai ser saída ou entrada usando GPIO_OUT OU GPIO_IN na funcão gpio_set_dir:
Se o pino for saida podemos controlar usando:
Ou se for entrada, podemos ler o valor do pino:
Snippets
Snippets relacionados ao uso básico do periférico GPIO.
GPIO Saída - LED
Configurando um pino como saída e piscando um LED.
Simulação no wokwi / pico-examples/blink/blink.c

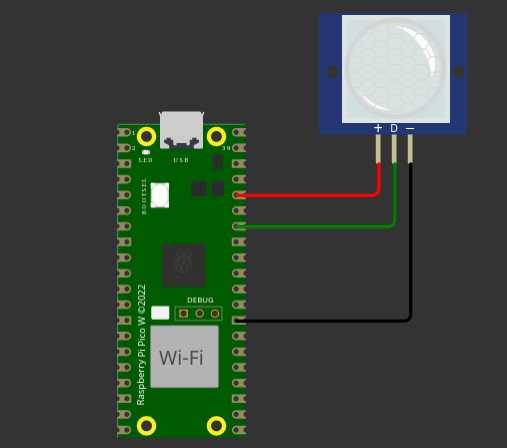
GPIO Entrada - PIR (sem pull-up)
Exemplo de ler um sensor de presença.
GPIO Entrada - Botão (com pull-up)
Exemplo de ler um botão com pull-up do próprio GPIO.
Ao lermos um botão é necessário ativarmos um pull-up.

