UART
UART é um dos protocolos mais utilizados para comunicação em sistemas digitais, o que inclui computadores, microcontroladores e sistemas embarcados. UART significa Universal Asynchronous Receiver-Transmitter, e é um protocolo de comunicação utilizado em hardware que permite uma comunicação assíncrona - comunicação que não ocorre ao mesmo tempo entre os dispositivos - e com velocidade de transmissão configurável.
Aplicações práticas:
- Debugging: UART ajuda na capturação de mensagens do sistemas e consequentemente ajuda na solução de bugs do sistema.
- Teste: Verificação de produtos antes de saírem da linha de produção buscando uma melhor qualidade para o usuário final.
- Podemos utilizar UART para conectar com módulos bluetooth e também com módulos de GPS.
Vantagens do UART:
- UART por si só é simples pois utiliza dois fios.
- Há verificação de bits de paridade para verificação de erro de pacotes de dados.
- UART é extremamente utilizado.
Desvantagens do UART:
- O data frame é limitado 8 bits.
- O Baud Rate do dispositivo que transmite e do que recebe devem ser o mesmo.
Na prática
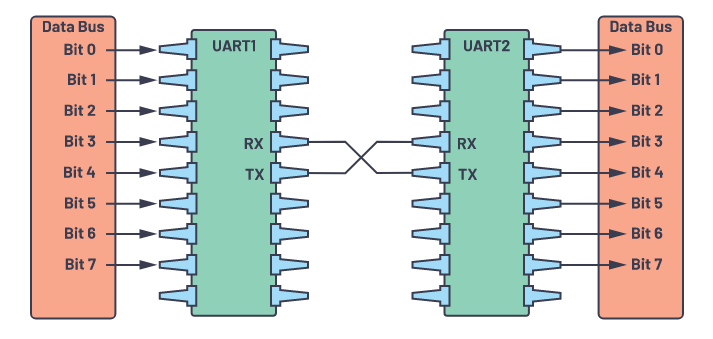
A principal utilização de um UART para transmissão e recebimento de dados está demonstrado na Figura 1, nela é possível ver duas UART diferentes, e entre elas há uma comunicação bidirecional, atraveś dos pinos RX e TX podemos transferir neste caso até 1 byte de informações.
Figura 1 - Transmissão e recepção UART
Transmissão na prática
No contexto da UART, o pacote de dados transmitido segue a estrutura da Figura 2, nela é possível ver que temos o Start Bit, o Data Frame ou Word data, o Parity Bits e o Stop Bits. Falaremos um pouco sobre eles a seguir.
Figura 2 - Bits protocolo UART

-
Start Bit: Quando não está transmitindo, o UART fica em nível lógico alto, e quando transmite o UART muda de nível lógico alto para nível lógico baixo. O UART que receberá os dados vai detectar a mudança de HIGH para LOW voltage de quem está transmitindo e começará a leitura dos bits precisamente de acordo com o baud rate.
-
Paridade: O Bit de Paridade serve para checar se algum bit foi alterado durante a transmissão. Os bits podem mudar por radiação elegromagnética, baud rates diferentes ponta-a-ponta, longa distâncias de transmissão, entre outros motivos. Se o Bit de paridade for 0, o número de bits 1 no dataframe deve ser um valor par. Se o Bit de paridade for 1, o número de bits 1 no dataframe deve ser um valor ímpar
-
Stop Bits: Para notificar o fim do pacote, a UART envia no final os Stop Bits, que servem para identificar o final da transmissão, para tal o Stop Bit com 1 modifica o estado de transmissão de dados da UART e a mesma para a transmissão em seguida. O Stop Bits pode ter até dois bits de parada.
-
Data Frame: Data Frame é o trecho que contém os dados a serem transmitidos, ele pode ter tamanho de até 8 bits. Na maioria dos casos os dados são enviado com o ***Least Significant Bit** primeiro.
Exemplo de transmissão:
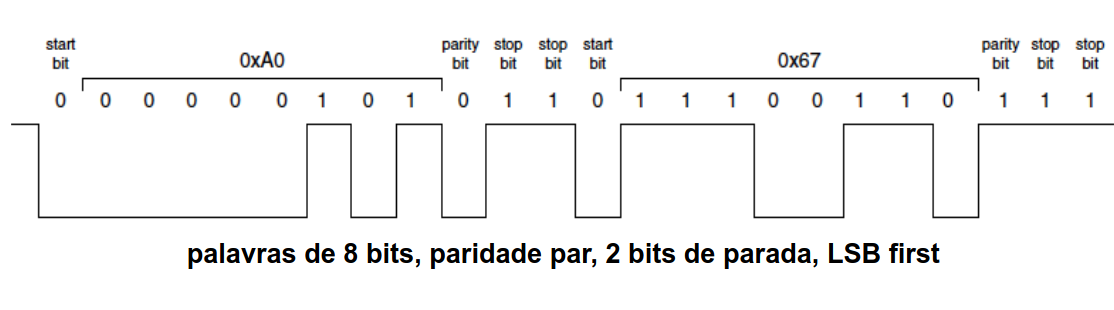
A figura a seguir demonstramos a transferência de 2 pacotes de dados:
-
O primeiro pacote contendo 0xA0 hexadecimal, que é igual a 10100000 em binário e que em ASCII é o equivalente ao símbolo á.
-
O segundo pacote contendo 0x67 hexadecimal, que é igual a 01100111 em binário e que em ASCII é o equivalente ao símbolo g.
Neste caso o LSB é utilizado, então o primeiro dado a ser enviado é o bit menos significativo, e o último é o MSB, o bit com maior valor significativo. Checando os Bits do data frame e o bit da paridade, vemos que não obtivemos perca de pacotes nas transmissões. Observamos também que o data frame começou a ser transmitido depois que o Start Bit mudou de 1 para 0. E finalmente, quando tivemos o Stop Bit, neste caso dois, finalizamos a primeira transferência e iniciamos a outra. Se tivermos no dispositivo receptor UART algo que convertesse os bits recebidos para caracteres, teríamos recebido os caracteres á e g em sequência.
RP2040 / PICO
No microcontrolador que estamos utilizando - o RP2040 -, conseguimos utilizar até duas instâncias do periférico UART. Na figura 4 é demonstrado o periférico UART da RP2040, onde há a localização do mesmo dentro do chip.

Na Prática
Será abordado neste tópico algumas funções essenciais do nosso SDK RP2040 para utilizarmos o periférico UART.
- Inicializa a UART e seleciona por default:
- 8 data bits (tamanho do data frame)
- Sem paridade
- 1 Stop Bit
- Possui dois argumentos:
- uart: Para definir qual instância do UART será utilizada (temos disponíveis a uart0 e a uart1)
- baudrate: Baudrate (9600, 115200, etc)
- Serve como um MUX para selecionar qual das funções disponíveis do pino em questão será utilizada. Para escolhermos o pino certo temos sempre que conferir as funções de cada pino.
- Possui dois argumentos:
- O número do GPIO
- A função que você quer utilizar do pino
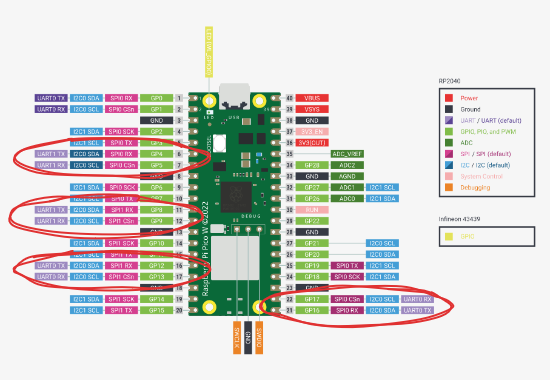
É possível ver na figura 5 quais pinos podem fornecer a função de UART, podemos utilizar apenas 2 interfaces, a UART0 e a UART1.
- Escreve apenas um caracter para ser transmitido via UART sem qualquer conversão.
- Possui dois argumentos:
- O primeiro é a instância (uart0 ou uart1) no qual o caracter será transmitido.
- O segundo é o caracter que será enviado.
- Transmite uma string via UART com conversão CR/LF.
- Possui dois argumentos:
- O primeiro é a instância (uart0 ou uart1) no qual o caracter será transmitido.
- O segundo argumento é a string a ser enviada.
- Transmite um caracter via UART com conversão CR/LF opcional.
- Possui dois argumentos:
- O primeiro é a instância (uart0 ou uart1) no qual o caracter será transmitido.
- O segundo é o caracter a ser enviado.
SDK
Para usar o UART você deve modificar o CMakeLists.txt adicionando hardware_uart no target_link_libraries:
E adicionar no headfile:
Snippets
Códigos de exemplo para o UART.
Hello UART
Simulação no wokwi / pico-examples/dma/hello_dma/hello_dma.c
/**
* Copyright (c) 2020 Raspberry Pi (Trading) Ltd.
*
* SPDX-License-Identifier: BSD-3-Clause
*/
#include <stdio.h>
#include "pico/stdlib.h"
#include "hardware/uart.h"
/// \tag::hello_uart[]
#define UART_ID uart0
#define BAUD_RATE 115200
// We are using pins 0 and 1, but see the GPIO function select table in the
// datasheet for information on which other pins can be used.
#define UART_TX_PIN 0
#define UART_RX_PIN 1
int main() {
// Set up our UART with the required speed.
uart_init(UART_ID, BAUD_RATE);
// Set the TX and RX pins by using the function select on the GPIO
// Set datasheet for more information on function select
gpio_set_function(UART_TX_PIN, GPIO_FUNC_UART);
gpio_set_function(UART_RX_PIN, GPIO_FUNC_UART);
// Use some the various UART functions to send out data
// In a default system, printf will also output via the default UART
// Send out a character without any conversions
uart_putc_raw(UART_ID, 'A');
// Send out a character but do CR/LF conversions
uart_putc(UART_ID, 'B');
// Send out a string, with CR/LF conversions
uart_puts(UART_ID, " Hello, UART!\n");
}
/// \end::hello_uart[]
Referências:
-
"UART COmmunication Working Applications". Disponível em: https://microcontrollerslab.com/uart-communication-working-applications/
-
"UART a HARDWARE Communication Protocol". Disponível em : https://www.analog.com/en/resources/analog-dialogue/articles/uart-a-hardware-communication-protocol.html
-
"RP2040 Datasheet." Disponível em: https://datasheets.raspberrypi.com/rp2040/rp2040-datasheet.pdf?_gl=1133hn0o_gaNzczNjI3NTcwLjE3MDA1OTg2MjI._ga_22FD70LWDS*MTcxMTQ3MzYxOC4yMi4xLjE3MTE0NzQyMDguMC4wLjA
-
"Raspberry Pi Pico W Datasheet." Disponível em: https://datasheets.raspberrypi.com/picow/pico-w-datasheet.pdf?_gl=1cxqmyl_gaNzczNjI3NTcwLjE3MDA1OTg2MjI._ga_22FD70LWDS*MTcxMTQ3MzYxOC4yMi4xLjE3MTE0NzQzNzYuMC4wLjA
-
"Raspberry Pi Pico C/C++ SDK." Disponível em: https://datasheets.raspberrypi.com/pico/raspberry-pi-pico-c-sdk.pdf?_gl=11jwcl4q_gaNzczNjI3NTcwLjE3MDA1OTg2MjI._ga_22FD70LWDS*MTcxMTQ3MzYxOC4yMi4xLjE3MTE0NzQzNzYuMC4wLjA
-
"Comunicação Serial (UART)". Disponível em: http://www1.rc.unesp.br/igce/demac/alex/disciplinas/MicroII/EMA864315-Serial.pdf.