
Corsi
Multi-core
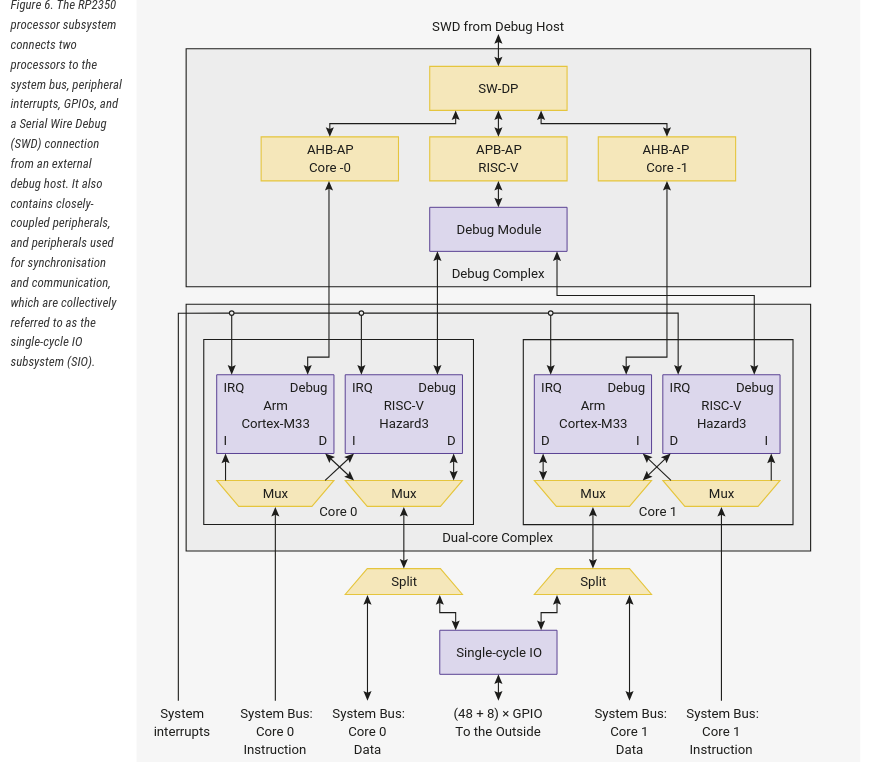
O RP2350 é um sistema dual-core simétrico. Os dois núcleos operam simultaneamente e de forma independente, oferecendo alto throughput de processamento e a capacidade de direcionar interrupções para núcleos distintos, melhorando tanto o throughput quanto a latência no tratamento de interrupções.
Os dois núcleos possuem uma visão simétrica do barramento do sistema: todos os recursos de memória no RP2350 são igualmente acessíveis por ambos os núcleos, com o mesmo desempenho.
Paradigmas de Arquitetura para Sistemas Multicore
Em sistemas embarcados multicore, a divisão de responsabilidades entre os núcleos pode seguir diferentes estratégias. Considerando um cenário inicial sem sistema operacional (bare-metal), destacam-se dois paradigmas principais:
1. Arquitetura Mestre–Acelerador (Master–Worker)
Um núcleo (core primário) executa a lógica principal da aplicação, incluindo controle de fluxo e gerenciamento de estado.
O segundo núcleo (core secundário) é dedicado à execução de tarefas computacionalmente intensivas (CPU-bound), como:
- Processamento digital de sinais (DSP)
- Cálculos matemáticos complexos (FTP)
- Criptografia
- Processamento de dados
2. Particionamento Funcional Simétrico
Cada núcleo é responsável por um subconjunto específico do sistema, com responsabilidades de complexidade semelhante. A divisão pode ser feita por domínio funcional (ex.: comunicação e controle) ou por etapas de processamento.
Esse modelo exige definição clara de sincronização, compartilhamento de memória e mecanismos de exclusão mútua.
Interrupções
Cada núcleo possui um controlador de interrupções independente, e ambos compartilham praticamente o mesmo conjunto de fontes de interrupção.
O SDK associa a interrupção ao núcleo que a inicializou, conforme o exemplo abaixo:
c
void gpio_set_irq_callback(gpio_irq_callback_t callback) {
uint core = get_core_num();gpio
Por esse motivo, cada núcleo pode ter um callback de interrupção independente do outro. Ou seja, podemos ter dois callbacks de GPIO distintos — um para cada núcleo.
Usando multiplos COREs
A ideia é que teremos duas funções main cada uma com um loop infinito while(1) executando independente em cada um dos COREs ARM que a pico possui.
Para isso iremos ter que criar uma segunda função main, usualmente chamada de core1_entry nos exemplos oficiais da rasp pico, e indicar para o processador que ela será executada no segundo core, isso é feito pelo uso da função pela chamada da função no main principal.
multicore_launch_core1(core1_entry);Sincronismo
Ao trabalhar com sistemas multicore, é comum precisar:
- Sincronizar um núcleo com o outro (por exemplo, liberar a execução do outro núcleo após determinado evento).
- Transferir informações entre os núcleos.
Variável global
Podemos resolver isso utilizando uma variável global compartilhada entre os núcleos? Teoricamente, sim.
Uma variável global é visível e acessível por ambos os núcleos no RP2350. Como ambos compartilham o mesmo espaço de memória SRAM, declarar uma variável como global permite que os dois núcleos leiam e escrevam nela.
Porém — e este ponto é crítico — visibilidade ≠ sincronização.
Acesso concorrente sem mecanismos de proteção resulta em:
- Data races
- Comportamento indefinido
- Bugs difíceis de reproduzir e depurar
Portanto, é necessário utilizar mecanismos apropriados de sincronização.
FIFO
Um dos mecanismos clássicos de sincronização e transferência de dados entre núcleos é a FIFO (First-In, First-Out).
Os microcontroladores da série RP possuem duas FIFOs para passagem de dados, mensagens ou eventos ordenados entre os dois núcleos e cada FIFO possui largura de 32 bits.
Funções principais da API de FIFO
c
// Verifica se há dados disponíveis na FIFO de leitura
// (dados enviados pelo outro núcleo)
static bool multicore_fifo_rvalid (void);
// Envia dados para a FIFO de escrita
// (dados destinados ao outro núcleo)
void multicore_fifo_push_blocking (uint32_t data);
// Remove (lê) um dado da FIFO de leitura
// (dados vindos do outro núcleo)
uint32_t multicore_fifo_pop_blocking (void);
// Remove (lê) um dado da FIFO de leitura com timeout
bool multicore_fifo_pop_timeout_us (uint64_t timeout_us, uint32_t *out);SDK
Para usar o ADC você deve modificar o CMakeLists.txt adicionando pico_multicore no target_link_libraries:
diff
target_link_libraries(
....
.....
+ pico_multicore
)E adicionar no headfile:
c
#include "pico/multicore.h"Snippets
Códigos exemplo para uso do multicore da pico.
Hello world
O exemplo a seguir executa dois printf um em cada core (main e core1_entry):
c
#include <stdio.h>
#include "pico/stdlib.h"
#include "pico/multicore.h"
void core1_entry() {
while(1){
printf("Hello, core 1!\n");
sleep_ms(100);
}
}
int main() {
stdio_init_all();
// inicializa core 1 com a função core1_entry
multicore_launch_core1(core1_entry);
while(1){
printf("Hello, core 0!\n");
sleep_ms(250);
}
}Sincronismo
No código a seguir, cada CORE controla um dos LEDs que estão conectados na pico, o CORE_0 controla o LED_0 e o CORE_1 controla o LED_1. Os LEDs nunca piscam juntos, primeiro o LED_0 pisca por 5 vezes então o LED_1 pisca por outras 5 vezes. Uma FIFO de comunicação é utilziada como mecanismo de sincronizacão.
c
#include <stdio.h>
#include "pico/stdlib.h"
#include "pico/multicore.h"
const int LED_0 = 15;
const int LED_1 = 16;
void core1_entry() {
printf("Hello, core 1!\n");
gpio_init(LED_1);
gpio_set_dir(LED_1, GPIO_OUT);
int i = multicore_fifo_pop_blocking();
while(1){
if (i++ < 5) {
gpio_put(LED_1, 1);
sleep_ms(250);
gpio_put(LED_1, 0);
sleep_ms(250);
} else {
multicore_fifo_push_blocking (0);
i = multicore_fifo_pop_blocking();
}
}
}
int main() {
stdio_init_all();
printf("Hello, core 0!\n");
// inicializa core 1 com a função core1_entry
multicore_launch_core1(core1_entry);
gpio_init(LED_0);
gpio_set_dir(LED_0, GPIO_OUT);
int i = 0;
while(1){
if (i++ < 5) {
gpio_put(LED_0, 1);
sleep_ms(250);
gpio_put(LED_0, 0);
sleep_ms(250);
} else {
multicore_fifo_push_blocking (0);
i = multicore_fifo_pop_blocking();
}
}
}